Je me suis servi d'un moteur d’essuie glace 12v(conseil de JPG), d'une chaine de vélo, d'un profilé acier pour faire guide à la plate forme en montée et descente.
Après plusieurs essaies, je monte un système avec poulie de mouflage pour plus de force, moins de vitesse et d'un contre poids pour aider le moteur.
Pour le contre poids, j'ai calculé le poids de la plate forme (10kg) + la moitié du poids du semi chargé (10kg) donc 20kg pour le contre poids (conseil d'un frangin ascensoriste)
Pour ce qui possède des dumpers, quel est leurs poids chargé?
Alors par contre, je veux essayer de rendre l'ascenseur autonome
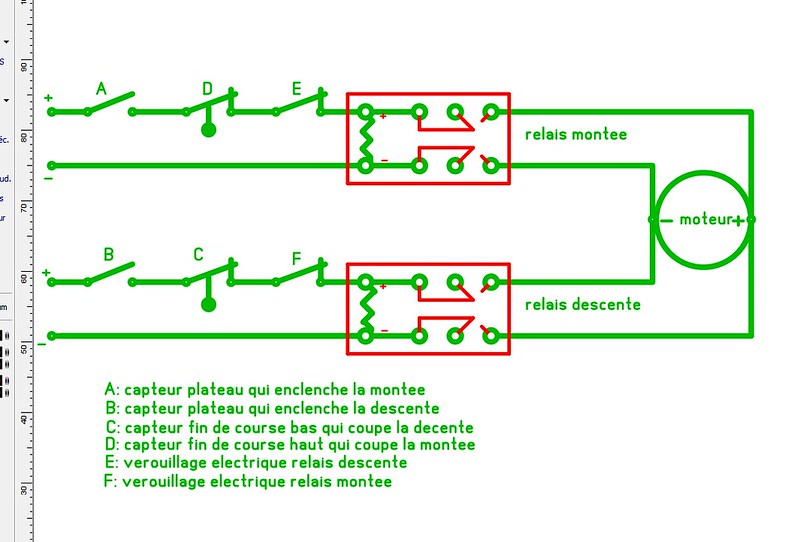
je vais fixer deux capteurs fin de course magnétique, HAUT et BAS
deux capteurs fin de course à gauche et droite de la plate forme
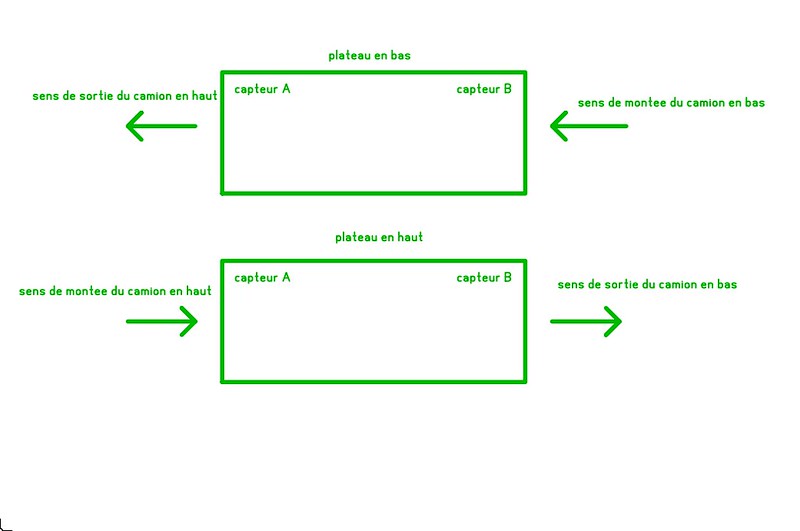
Les capteurs de la plate forme servent pour autoriser l'ascenseur de monter ou descendre lorsque l'engin est bien positionné sur celle ci.
Sauf que le souci, exemple :
Lorsque l'ascenseur est en bas, le camion se positionne sur la plate forme roue avant sur le capteur du coup l’ascenseur monte
Arrivé au capteur HAUT, il coupe l'alimentation du moteur d'essuie glace dans le sens montée.
Mais la remorque à les roues positionnées sur l'autre capteur de la plate forme, ce qui fait qu'arrivé en position haute l'ascenseur va redescendre de suite
Je pensais mettre une tempo entre chaque cycle montée est descente ce qui laisserai à l'engin de sortir? L’Arduino peut il gérer ceci????